
I am pursuing a Ph.D. in Computer Science at The University of Texas at Austin where I am fortunate to be advised by Prof. Roberto Martín-Martín and am part of the Robot Interactive Intelligence (RobIn) lab. I am passionate about developing general-purpose, deployable robots in the wild. My research focuses on failure-aware and safe robot learning, enabling robots to act reliably in the real world.
I did a Research Internship at the Robotics and AI Institute (RAI) in Summer 2025. I previously finished my MS in Computer Science from Columbia University, advised by Prof. Shuran Song, and my undergraduate from the Indian Institute of Information Technology - Allahabad (IIIT-A), advised by Prof. G. C. Nandi.
I also love to play tennis, basketball, music and to snowboard.
Research
 MoMaGen: Generating Demonstrations under Soft and Hard Constraints for Multi-Step Bimanual Mobile Manipulation
MoMaGen: Generating Demonstrations under Soft and Hard Constraints for Multi-Step Bimanual Mobile Manipulation
Chengshu Li*,
Mengdi Xu*,
Arpit Bahety*,
Hang Yi*,
Yunfan Jiang,
Huang Huang,
Josiah Wong,
Sujay Garlanka,
Cem Gokmen,
Ruohan Zhang,
Weiyu Liu,
Jiajun Wu,
Roberto Martín-Martín,
Fei-Fei Li
International Conference on Learning Representations (ICLR 2026)
Website •
Paper •
Video •
Code •
Poster
TL;DR: An automated data generation method for multi-step bimanual mobile manipulation that satisfies hard constraints (e.g., reachability) while balancing soft constraints (e.g., visibility).
Arpit Bahety,
Arnav Balaji,
Ben Abbatematteo,
Roberto Martín-Martín
Robotics: Science and Systems (RSS 2025)
Website •
Paper •
Video •
Poster •
RSS Presentation
TL;DR: A frameowrkd that enables robots to safely and autonomously learn multi-step mobile manipulation tasks from a single human video by segmenting, translating, and adapting the demonstrated actions to their own morphology.
Arpit Bahety,
Priyanka Mandikal,
Ben Abbatematteo,
Roberto Martín-Martín
Robotics: Science and Systems (RSS 2024)
Outstanding Student Paper Finalist
Website •
Paper •
Video •
Code •
Poster •
RSS Presentation
TL;DR: A method to teach robots bimanual manipulation using human video demonstrations, by leveraging a novel, psychology- and biomechanics-inspired action space to learn effectively from failures in the real world.
Gu-Cheol Jeong,
Arpit Bahety,
Gabriel Pedraza,
Ashish D. Deshpande,
Roberto Martín-Martín
International Conference on Intelligent Robots and Systems (IROS 2024)
Best Paper Award on Robot Mechanisms and Designs
Website •
Paper •
Assembly Instructions •
Usage Code •
Video
TL;DR: A novel hybrid rigid–flexible robotic gripper that enhances versatility (e.g. compliant grasping and precise pinching) and collision-tolerance, enabling safer and robust robot learning in everyday environments.
Zeyi Liu*,
Arpit Bahety*,
Shuran Song
Conference on Robot Learning (CoRL 2023)
Website •
Paper •
Code •
Video
TL;DR: A framework that leverages LLM for robot failure explanation and correction, based on a hierarchical summary of robot past experiences generated from multisensory data.
Arpit Bahety*,
Shreeya Jain*,
Huy Ha,
Nathalie Hager,
Benjamin Burchfiel,
Eric Cousineau,
Siyuan Feng,
Shuran Song
International Conference on Intelligent Robots and Systems (IROS 2023)
Website •
Paper •
Code (coming soon) •
Video
TL;DR: A robotic system that learns to pack rigid and deformable objects into deformable bags using two learned policies for object rearrangement and bi-manual bag lifting.
Arpit Bahety,
Rohit Saluja,
Ravi Kiran Sarvadevabhatla,
Anbumani Subramanian,
C. V. Jawahar
Indian Conference on Computer Vision, Graphics and Image Processing (ICVGIP), 2021
Paper •
Code •
Video •
The Indian Express •
Telangana Today •
Edexlive
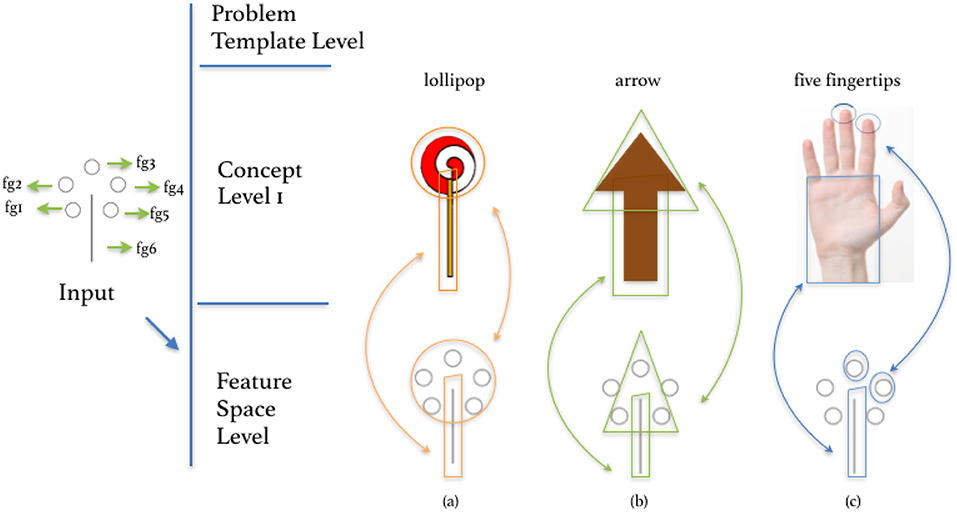
 An approach to computational creation of insight problems using CreaCogs principles
An approach to computational creation of insight problems using CreaCogs principles
Arpit Bahety, Ana-Maria Olteteanu
7th International Workshop on Artificial Intelligence and Cognition, 2019
Paper
 Towards a Multi-level Exploration of Human and Computational Re-representation in Unified Cognitive Frameworks
Towards a Multi-level Exploration of Human and Computational Re-representation in Unified Cognitive Frameworks
Ana-Maria Olteteanu, Mikkel Schöttner, Arpit Bahety
Frontiers in Psychology, 2019
Paper
* indicates equal contribution
Service
- Conference Reviewer: ICRA, IROS
-
Teaching Assistant:
- COMS 4773: Robot Manipulation and Learning (Spring 2024, UT Austin)
- COMS 4773: Computational Aspects of Robotics (Spring 2022 and Spring 2023, Columbia University)
- COMS 4995: Neural Networks and Deep Learning (Fall 2021, Columbia University)